西门子将电气化、自动化、数字化的力量融入各行各业,以前所未见的高度、速度、精度和深度,让关键所在,逐一实现。
德国制造: 现货 联 系 人: 黄勇《黄工》 24小时联系手机: 13701633515
全新原装: 参数
质量保证: 保修 直线销售 电 话: 021-61311931 在 线 商 务 QQ: 77956468
| 6ES71944GA000AA0 | NARROW, L: 500MM |
| 6ES71944GA200AA0 | NARROW, L: 2000MM |
| 6ES71944GA600AA0 | NARROW, L: 1000MM |
| 6ES71944GB000AA0 | WIDE, L: 500MM |
| 6ES71944GB200AA0 | WIDE, L: 2000MM |
| 6ES71944GB600AA0 | WIDE, L: 1000MM |
| 6ES71944GC700AA0 | COMPACT,L: 500MM |
| 6ES71944GC200AA0 | COMPACT,L: 2000MM |
| 6ES71944GC600AA0 | COMPACT,L: 1000MM |
| 6ES71944GD000AA0 | COMPACT WIDE, L: 500MM |
| 6ES71944GD200AA0 | COMPACT WIDE, L: 2000MM |
| 6ES71944GD100AA0 | COMPACT WIDE, L: 1000MM |
| 6ES71413BF000XA0 | 8DI DC 24V |
| 6ES71413BH000XA0 | 16DI DC 24V |
| 6ES71423BF000XA0 | 8DO DC 24V/2A |
| 6ES71423BH000XA0 | 16DO DC 24V/0.5A |
| 6ES71433BH000XA0 | 8DI/8DO DC 24V/2A |
| 6ES71433BH100XA0 | 8DI/8DO DC 24V/1.3A |
| 6ES71943AA000AA0 | ET 200eco DP, ECOFAST CONNECTING BLOCK |
| 6ES71943AA000BA0 | ET 200eco DP, M12, 7/8" CONNECTING BLOCK |
| 6ES71943JA000AA0 | BLANK PLUG 7/8" , 10PCS |
| 6ES71941KA010XA0 | Y CONNECTOR |
| 6ES71941JB100XA0 | BLANK PLUG ECOFAST, 10PCS |
| 6ES71416BF000AB0 | 8 DI DC 24V; 4×M12 |
| 6ES71416BG000AB0 | 8 DI DC 24V; 8×M12 |
| 6ES71416BH000AB0 | 16 DI DC 24V; 8×M12 |
| 6ES71426BF500AB0 | 8 DO DC 24V/0.5A; 4×M12 |
| 6ES71426BF000AB0 | 8 DO DC 24 V/1.3A; 4×M12 |
| 6ES71426BG000AB0 | 8 DO DC 24 V/1.3A; 8×M12 |
| 6ES71426BR000AB0 | 8 DO DC 24 V/ 2A; 8×M12 |
| 6ES71426BH000AB0 | 16 DO DC 24 V/1.3A; 8×M12 |
| 6ES71476BG000AB0 | 8 DIO DC 24 V/1.3A; 8×M12 |
| 6ES71446KD000AB0 | 8 AI 4 U/I + 4 RTD/TC; 8×M12 |
| 6ES71446KD500AB0 | 8 AI RTD/TC; 8×M12 |
| 6ES71456HD000AB0 | 4 AO U/I; 4×M12 |
| 6ES71486JA000AB0 | IO-LINK MASTER |
| 6ES71486CB000AA0 | PD DC 24 V; 1×7/8" |
| 6ES79720BA120XA0 | DP CONNECTOR, 90 DEGREE, W/O PG SOCKET |
| 6ES79720BB120XA0 | DP CONNECTOR, 90 DEGREE, W PG SOCKET |
| 6ES79720BA420XA0 | DP CONNECTOR, 35 DEGREE, W/O PG SOCKET |
| 6ES79720BB420XA0 | DP CONNECTOR, 35 DEGREE, W PG SOCKET |
| 6ES79720BA520XA0 | DP CONNECTOR, 90 DEGREE, W/O PG SOCKET, FC |
| 6ES79720BB520XA0 | DP CONNECTOR, 90 DEGREE, W PG SOCKET, FC |
| 6ES79720BA600XA0 | DP CONNECTOR, 35 DEGREE, W/O PG SOCKET, FC |
| 6ES79720BB600XA0 | DP CONNECTOR, 35 DEGREE, W PG SOCKET, FC |
| 6ES79720BA700XA0 | PROFIBUS CONNECTOR, 90 DEGREE, W/O PG SOCKET |
| 6ES79720BB700XA0 | PROFIBUS CONNECTOR, 90 DEGREE, W PG SOCKET |
西门子MASTERDRIVES系列驱动器
SIMOVERT MASTERDRIVES MC - 运动控制驱动器
---- MASTERDRIVES MC覆盖了功率范围从0.2kW到250kW的所有应用领域,并且通过了CE、EN、VL和CSA的国际。另外,运动控制驱动器具有很宽的电压使用范围,这使得它能够在世界各地使用。
---- 如果您需要控制循环周期短而且高精度、高动态响应的控制系统,那么您应该仔细考虑一下SIMOVERT MASTERDRIVES MC运动控制驱动器。这种驱动器是智能控制系统的一部分。它能够实现机动、灵活和高效的驱动控制,其性能远远超过同类变频系统。在同步驱动器领域,运动控制确立的全球伺服标准也已经有很多年了。这是一种工程造价成本低、控制精确度高、应用灵活的驱动系统,它已经在全世界范围内广泛应用,而且它是完全智能化的控制系统,它能保证您的生产系统在运行中具有很高的动态响应。
高动态响应,一流的灵活性和精确性:MASTERDRIVES MC驱动器使用了32位数字控制技术。
高过载因数能帮助您处理高难度的应用问题:MC运动控制驱动器有极高的过载因数:250ms内300%的过载能力。
高性能,小体积:例如一个功率为0.75kW的Compact PLUS紧凑增强型驱动器长宽高分别仅为260mm、45mm和360mm,可以很容易地安装于300mm深的箱体中。
集成式安全保护装置保障了所有功能的安全应用:具有的"安全停止"功能,已经通过了一个安全生产调整部门的。
软件:灵活运用BICO技术,它们可被应用于所有必要的开环和闭环控制。
Performance 2能使循环运行的机器具有更高的动态响应,提高了的动态响应允许电流和转速控制器在T0中的计算时间减少到100微秒,而工艺软件和自由功能模块(例如F01)的计算时间在1.6毫秒之内。这些高性能已经与新一代的运动控制系统-SIMOTION结合在了一起。
F01工艺软件包-可以满足所有应用要求
SIMOLINK:多达200个驱动器的同步控制
SIMOVERT MASTERDRIVES Vector Control 矢量控制模块:能够使您的机器设备与众不同的驱动系统
---- 对于额定驱动功率高达6000KW的连续过程控制任务来说,它对自动控制和驱动技术的要求都很高。作为已经在世界范围内取得了巨大成功的驱动系统,SIMOVERT MASTERDRIVE Vector Control 矢量控制模块将是您的正确选择。您会选择一个与众不同的驱动系统,它可以动态、高效、二灵活的应用于所有领域。
---- MASTERDRIVES Vector Control 的控制原理是独一无二的:
从驱动器的过程控制刀自动控制都采用了一个专门的工程管理工具-Drive ES
功率范围从0.55KW到6000KW,采用了独创性的控制原理、独创性的参数配置和独创性的操作控制概念
---- 就控制精度、控制可靠性以及对电网无干扰的主动性前端(Active Front End)技术的实用性而言,MASTERDRIVES Vector Control 矢量控制领先于所有对手。而Vector Control Compact PLUS的紧凑性也是世界第一的。综合化、集成化和智能化时期可以灵活的满足各种机械和应用需求,使机器设备的生产能力达到最高。简而言之-一个统一的控制系统可以带来管理成本的降低、全球化的应用能力、高精确度、应用的灵活性和绝佳的应用表现-当然,这需要控制系统与自动化生产系统整体上保持完美的协调。
---- SIMOVERT MASTERDRIVES Vector Control 可以处理所有驱动问题的通用驱动器。不但可以对三项感应电动机进行驱动控制,可控电压高达690V,同时模块化的嵌入式操作单元卡,继承的自由功能模块使您的驱动方案更加灵活。
---- 无论在包装工业、印刷业、造纸业,还是木材加工业、纺织业、制造业、传输技术和高梁机架设备领域,MASTERDRIVES Vector Control 矢量控制都能提供具有很高生产效率的驱动解决方案。其原因是模块化的系统可以于所有的工业部门,它完全可以提供一个高成本效益的解决方案。
Compact PLUS驱动模块,体积最小,功率密度高。
安全集成工艺,确保功能的安全性
- Drive ES Basic通过完全集成自动化的入口
- Drive ES Graphic 自由的配置您的驱动功能
- Drive ES PCS 7将友好的用户界面集成到PCS 7系统
模块化设计,为每一种驱动概念都提供安全保证
出色的通讯装置,保持完全的开放型:
- 实现了各种自动化环境中的最佳连接
- 通过PROFIBUS-DP进行通讯使用USS协议的串行接口
- DriveMonitor基于PC或SIMATIC的简便的调试工具
- 可以进行快速现场调试和诊断的智能化操作面板
分布式智能内核,可用于所有任务的功能模块
- 具有最高动态响应和分布式智能化的MASTERDRIVES Vector Control 矢量控制驱动器
- 用于开环和闭环控制以及带有逻辑功能的综合BICO软件库
功能范围广泛的扩展模板,使用于各种应用
- 用T100/T300/T400模板解决复杂的技术功能
- 通用通讯模板CBP2和CBC
- 通过SIMOLINK,使用SLB模板实现驱动器之间的通讯
- 用EB1和EB2模板扩展输入和输出
- 使用外部脉冲编码器设置控制参考点的SBP模板
有没有比较简单的实现PID闭环控制的方法呢?
在控制理论中,用传递函数来描述被控对象、检测元件、执行机构和PID控制器。
被控对象一般是串联的惯性环节和积分环节的组合。在实验室可以用以运算放大器为核心的模拟电路来模拟广义的被控对象(包括检测元件和执行机构)的传递函数。我曾将这种运放电路用于S7-200和S7-1200的PID参数自动调节实验。
用运算放大器模拟被控对象一般需要做印刷电路板,还是比较麻烦。有没有更简单的方法呢?
除了用运算放大器来模拟被控对象的传递函数,也可以用PLC的程序来模拟。为此我编写了用来模拟被控对象的S7-200的子程序,它也可以用于S7-200 SMART。使用模拟的被控对象的PID闭环示意图如下图所示,虚线右边是被控对象,DISV是系统的扰动输入值。虚线左边是PLC的PID控制程序。

被控对象的数学模型为3个串联的惯性环节,其增益为GAIN,3个惯性环节的时间常数分别为TIM1~TIM3。其传递函数为

分母中的“s”为自动控制理论中拉普拉斯变换的拉普拉斯算子。将某一时间常数设为0,可以减少惯性环节的个数。图中被控对象的输入值INV是PID控制器的输出值。被控对象的输出值OUTV作为PID控制器的过程变量(反馈值)PV。
下图是模拟被控对象的子程序,实际上只用了两个惯性环节,其时间常数分别为5000ms和2000ms。用与PID的采样周期相同的定时中断时间间隔来调用这个子程序。

下图是用来监视PID回路运行情况的STEP 7-Micro/WIN的PID调节控制面板,可以用它进行PID参数自整定或手动调节PID参数的实验。标有PV(即被控量)的是过程变量的阶跃响应曲线。

将上图中的积分时间由0.03min(分钟)增大到0.12min,下图的超调量有明显的减小。通过修改PID的参数,观察被控量阶跃响应曲线给出的超调量和调节时间等特征量的变化情况,可以形象直观、快速地学习和掌握PID参数的整定方法。

CP243i作为连接S7-200的PPI口转以太网RJ45的接口转换器。如下图所示:

一. 硬件连接:
将CP243i的两端分别与S7-200的PPI口和以太网线连接(上图使用的是交叉网线,如果中间加交换机就要用直连网线,注:我们平时用的都是直连型网线)
二. 监控计算机的软件设置:
a.OPC—西门子PC_Access的设置:
S7-200一般都是通过PC_Access(OPC server)软件再与WinCC相连的。因此要首先
设置PC_Access, 但是在设置前一定要先运行一次西门子的MicroWin ,在它的设置PG/PC接口中选择 [ TCP/IP(Auto)à实际的网卡名 ],目地是将PC_Access的驱动选为TCP/IP, 之后打开PC_Access,见下图:

用鼠标右健点击 [ MicroWin(TCP/IP) ],然后用鼠标左键选择 [ 新PLC(N)… ]

只要填写 [ IP地址:192 .168 .1 .10 ](注:这是CP243i转换器的IP地址),然后直接点击 [ 确认 ] ,进入下图:

用鼠标点击 [NewPLC]à新(N) à项目(I) ,如下图所示:

新建项目的对话框:
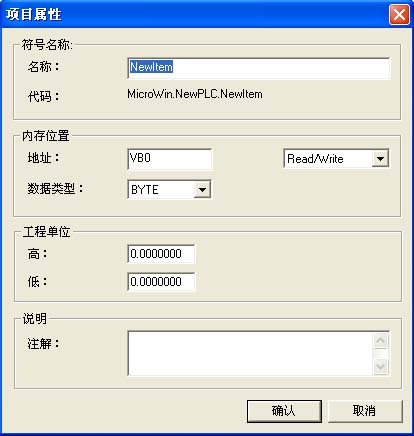
下边做4个例子:
(1)名称:ITEM_VB10,地址:VB10,数据类型:BYTE
(2)名称:ITEM_Q0_0,地址:Q0.0,数据类型:BOOL
(3)名称:ITEM_I0_2,地址:Q0.2,数据类型:BOOL
(4)名称:ITEM_MD20,地址:MD20,数据类型:REAL
添加完变量后,一定要存一下盘!至于文件名随便写一个或用缺省的也可
建立4个ITEM后,用鼠标安下图次序(1)(2)(3)依次点击,就进入了测试状态

如果通讯正常,质量显示为good 否则为bad
b. 西门子WinCC的设置:
打开WinCC,新建一个项目[ test_s7_200]:
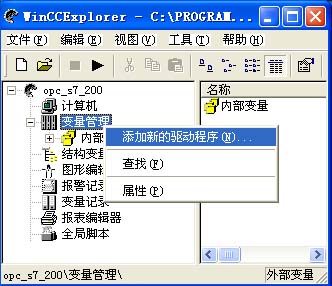
用鼠标右键点击 [变量管理] à 添加新的驱动程序(N) à选择 OPC.chn
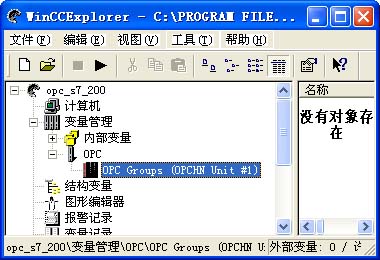
用鼠标右键点击 [OPC Groups (OPCHN Unit #1) ] à选择[ 系统参数 ]

用鼠标双击 [ \\<LOCAL> ] ,搜索本机OPC器:

选择 [ S7200.OPCServer ],再选择 [ 浏览器 ] ,
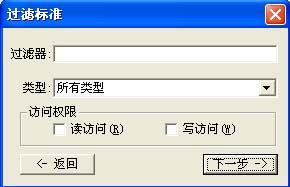
选择 [ 下一步 ]

将Items栏中内容全部选定,然后点击 [添加条目]
选择 [ 是 ]
选择 [ 确定 ]

选择 [ 完成 ],之后PC_Access中的变量就来到WinCC中:

联 系 人: 黄勇《黄工》 24小时联系手机: 13701633515直线销售 电 话: 021-61311931 在 线 商 务 QQ: 77956468
PID控制的难点在于整定控制器的参数。为了学习整定PID控制器参数的方法,必须做闭环实验,开环运行PID程序没有任何意义。用硬件组成一个闭环需要PLC的CPU模块、模拟量输入模块和模拟量输出模块,此外还需要被控对象、检测元件、变送器和执行机构。例如可以用电热水壶作为被控对象,用热电阻检测温度,用温度变送器将温度转换为标准电压,用移相控制的交流固态调压器作执行机构。
有没有比较简单的实现PID闭环控制的方法呢?
在控制理论中,用传递函数来描述被控对象、检测元件、执行机构和PID控制器。
被控对象一般是串联的惯性环节和积分环节的组合。在实验室可以用以运算放大器为核心的模拟电路来模拟广义的被控对象(包括检测元件和执行机构)的传递函数。我曾将这种运放电路用于S7-200和S7-1200的PID参数自动调节实验。
用运算放大器模拟被控对象一般需要做印刷电路板,还是比较麻烦。有没有更简单的方法呢?
除了用运算放大器来模拟被控对象的传递函数,也可以用PLC的程序来模拟。为此我编写了用来模拟被控对象的S7-200的子程序,它也可以用于S7-200 SMART。使用模拟的被控对象的PID闭环示意图如下图所示,虚线右边是被控对象,DISV是系统的扰动输入值。虚线左边是PLC的PID控制程序。
被控对象的数学模型为3个串联的惯性环节,其增益为GAIN,3个惯性环节的时间常数分别为TIM1~TIM3。其传递函数为
分母中的“s”为自动控制理论中拉普拉斯变换的拉普拉斯算子。将某一时间常数设为0,可以减少惯性环节的个数。图中被控对象的输入值INV是PID控制器的输出值。被控对象的输出值OUTV作为PID控制器的过程变量(反馈值)PV。
下图是模拟被控对象的子程序,实际上只用了两个惯性环节,其时间常数分别为5000ms和2000ms。用与PID的采样周期相同的定时中断时间间隔来调用这个子程序。
下图是用来监视PID回路运行情况的STEP 7-Micro/WIN的PID调节控制面板,可以用它进行PID参数自整定或手动调节PID参数的实验。标有PV(即被控量)的是过程变量的阶跃响应曲线。
将上图中的积分时间由0.03min(分钟)增大到0.12min,下图的超调量有明显的减小。通过修改PID的参数,观察被控量阶跃响应曲线给出的超调量和调节时间等特征量的变化情况,可以形象直观、快速地学习和掌握PID参数的整定方法。
