





站着操作装载机
2.4滑移式装载机工作臂 滑移式装载机主机动臂多采用箱形截面结构,借以好其扭转刚度。为整机布置所限,动臂只能采用双液压缸的形式。转斗液压缸通常设置在动臂前端,为解决在动臂过程种的“铲斗平移”问题,部分机采用四连杆结构,以减少动臂过程中铲斗的后翻角度,但却有碍司机视野。即便如此,也依然无法实现动臂下降时的“铲斗自动放平”。可以在动臂后短装设一对补偿缸,使其与转斗缸同向并联,上述“铲斗平移”和“铲斗自动放平”的问题有所的的同时,巧妙地利用铲斗载荷力矩的作用,增大了动臂过程中的力。
四驱小铲车
2.停车制动: 停车制动系统用来使车辆保持静止状态。从原则上说,它可以采用任一种具有锁定能力的机械加紧、锚固、插销、锲块、挡铁、卡齿等锁止机构,并不非要是渐进作用的。但在实用上为了和前述行走制动装置系统兼容,大多数停车装置仍然采用了结构原理与机械制动器类似的、带摩擦元件的结构,常见的有蹄式、带式、单盘式和多盘式等。停车制动系统对制动装置的要求是,制动能力应止车辆在条件下向任一方向意外移动,停车制动器与车轮之间不得存在可能使传动链中断的可操纵元件;停车制动的操作都是在车辆已处于静止状态时进行,纯粹的停车制动器具备吸收车辆动能的能力,也不允许在行进过程中操作;停车制动多在发动机熄火状态下进行操作,机构中的制动力只能由驾驶员人力能控制的纯机械传输,且要在不输入外界的的条件下长时间地保持在制动状态。这样,就排除了用液压、气压、电磁等助力方式实现停车自动的可能。但相关法规却不禁止实用这些辅助施力方式来解脱停车制动。因此,许多现代车辆都采用常闭方式实现停车制动,而用液压或气压方式解脱它。这种型式的停车制动器动作灵活,并具备发动机熄火或主液压系统失压后自动完成保护性制动的功能。实际上,问题往往出在缺少压力能源无法解脱它们,以便将故障车辆拖走。为此,设置了机械式(螺杆、杠杆等)液压式(手动泵或

四驱小铲车
四驱小铲车可进电梯 站着操作铲车宽0.9米

|
中首重工滑移装载机技术参数 |
|
|
发动机型号 |
美国原装进口汽油发动机 |
|
额定功率(kw/hp) |
17.2KW(23HP) |
|
额定转速(r/min) |
3600RPM |
|
额定铲斗容量(m3) |
0.15m³ |
|
额定装载质量(kg) |
300kg |
|
整机质量(kg) |
860kg |
|
行驶速度(km/h) |
0-5.5km/h |
|
卸载高度(mm) |
1500mm |
|
整机尺寸(mm) |
2200×1100×1230 |
|
轮胎型号 |
18*8.5-8 |
|
燃油箱容量(L) |
25 |
|
液压油箱容量(L) |
25 |
|
直挖 |
TY-030203M |
|
货叉 |
TY-010338M |
|
抓木叉 |
TY-0402M |
|
开沟机 |
TY-050136M |
|
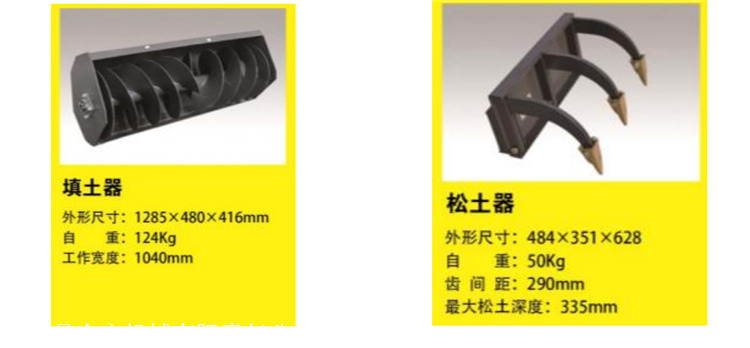
平土器 |
TY-0505M |
|
松土器 |
TY-0509M |
|
小挖 |
TY-030338M |
|
螺旋钻机 |
TY-0502M |
|
推雪板 |
TY-020472M |
|
旋耕犁 |
TY-0503M |
|
混凝土搅拌桶 |
TY-0301M |
|
斜角清扫器 |
TY-020238M |
|
封闭清扫器 |
TY-020143M |
|
吹雪机 |
TY-0207M |
|
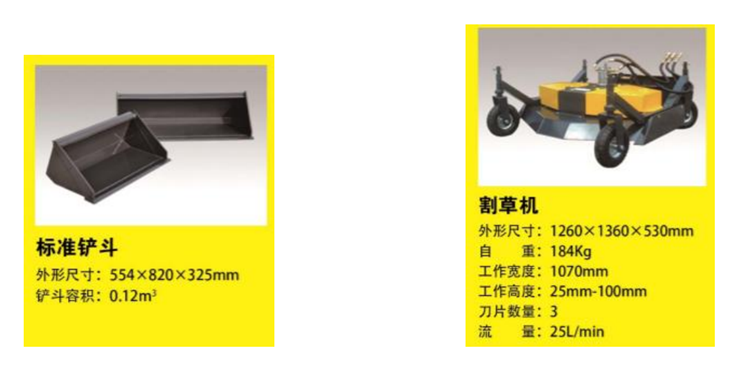
割草机 |
TY-0506M |
|
破桩机 |
|
|
标准铲斗 |
TY-010143M |
|
碎石铲斗 |
|
|
平板拖车 |
|

四驱小铲车

滑移式装载机各个部分的设计方案如下 1、车身设计采用前翻驾驶室,后开机罩式。 2、驱动方式设计采用全轮驱动的形式,转向通过两侧轮子的转速差来实现转向。本次设计主要强调用户多用途作业需要,因而采用前卸式合本次的设计要求。其结构简单、工作、视野好的优点也决定了采用前卸式。 3、滑移式装载机的工作臂可设计成三角机架的形式,当需要举升时,位于工作臂的下方的液压缸将工作臂往上推,当需要卸载时,液压缸收缩。在举升和卸载的过程中,都都要与地面保持水平,此时可以通过工作臂上的另一个液
站着操作铲车






四驱小铲车可进电梯 站着操作铲车宽0.9米
