远程水下自主式数码相机是采用机器人技术的水下数码相机系统,广泛用于海底自主式观测站、自主水下航行器(AUV)/无人水下航行器(UUV)、远程操纵潜水器(ROV)等。
远程水下自主式数码相机系统采用模块化设计,包括现场可更换的用于调整图像适应特殊操作需要的C-Mount镜头。图像传感器可更换,包括1400百万像素高分辨率传感器、低亮度/夜视电子倍增器CCD和低噪音Kodak彩色CCD。内部自动调焦机制自动移动图像传感器,支持零距离工作。在自主模式下,相机可以由定时器或外部信号触发;远程控制模式下,高分辨率的图像数据通过双绞线传输。高亮度的SL-3 LED脉冲使相机能够获得静止或移动的图像。两个通过电缆同步的相机可产生3D立体图像,用于体积测量等特殊应用。
系统外壳可根据具体应用选择,迭尔林(Delrin)外壳可使用至100m深度,钛外壳最深可应用至水下6000m深度。
典型应用:
自主式水下观测站;
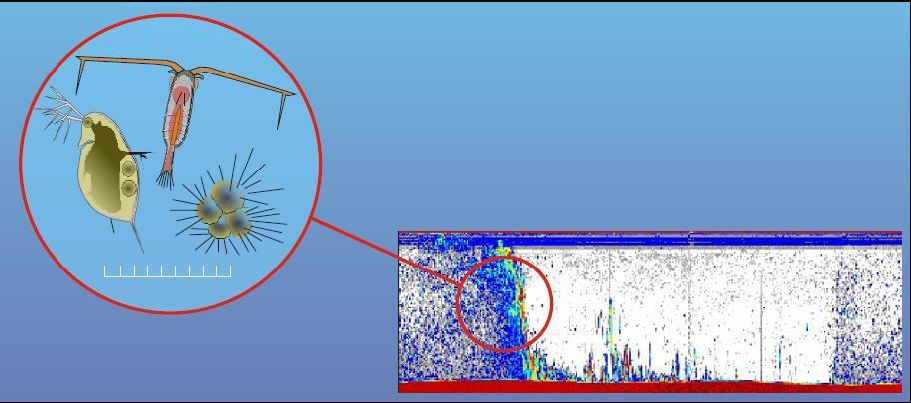
无人水下航行器,用于海底横断面和图像测绘;
微米级分辨率的ROV检测相机;
3D立体操作,用于体积、尺寸等测量。
功能:
内部存储容量32G;
内部自动调焦机制支持零距离工作;
支持静止和移动图像模式;
数字远程操作,支持高分辨率图像的获取;
可更换的C-Mount镜头。
- 产品
- 供应
- 公司
- 新闻